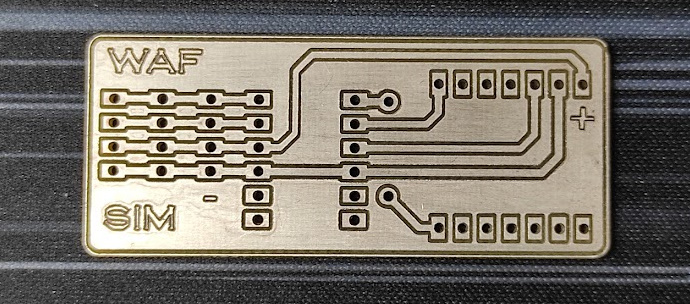
Après plus d’un an sans article, j’ai remis en service ma CNC pour graver un circuit électronique dans le cadre d’un petit projet de Dongle USB pour RX ELRS, Crossfire ou Tracer.
Concrètement, ça permet de connecter une radio équipée d’un TX ELRS, Crossfire ou Tracer à un PC pour pouvoir faire du simulateur, sans s’embarrasser d’un fil entre la radio et l’ordinateur. Dans cet article, seule et unique utilisation de ma CNC pour graver un PCB jusqu’ici, j’avais obtenu un résultat correct et fonctionnel, mais loin d’être parfait. Continue reading « CNC et PCB, volume 2 ! »→
Petit retour aux sources avec cette dernière session de Freestyle de l’année sur un nouveau spot très sympa :
https://www.youtube.com/watch?v=AjDK_Ph8EGQ
Ce vol c’est avec mon quad full FETtec, et donc firmware KISS. Sa fiche DroneBuilds est ici pour plus de détails.
Je vole avec depuis quelques mois. Si je suis vraiment fan du feeling KISS, malheureusement je vis l’enfer avec ces ESCs qui font une fois de temps de mini desyncs. FETtec est dépassé par le problème qui apparaît chez de plus en plus de pilotes et fait preuve d’une grande malhonnêteté. J’aurai l’occasion de revenir plus tard sur ce sujet.
Au début de l’année 2020, j’avais lancé la migration vers le système HD DJI FPV. Une fois qu’on y a gouté, difficile de revenir à l’analogique.
L’encombrement du Air Unit le rendait encore assez difficile à intégrer dans des builds de plus petite taille. Heureusement, le Caddx Vista n’a pas tarder à débarquer. Et forcément, il a fallu monter de nouvelles machines.
Cet été, j’ai profité des vacances dans le Jura pour faire tourner RSGO (ReelSteady GO) et m’essayer un peu à des vols plus cinématiques, pour changer :
https://www.youtube.com/watch?v=5YrsxbPl49Q
Le drone remplace maintenant l’appareil photo pour les souvenirs de vacances.
Le blog a été laissé à l’abandon pendant une grosse partie de l’année et lorsque j’avais un peu de temps, j’ai privilégié la rédaction d’articles pour We Are FPV. Vous pourrez les retrouver ici :
Si vous êtes nouveaux dans le monde du FPV, on a essayé d’écrire un article ultra complet pour les débutants qui permet d’offrir une vision d’ensemble sur le hobby : Le drone FPV pour les nuls.
Depuis plus d’un an, je suis vraiment focalisé sur le FPV. La CNC roupille, plus de robots, mais de nombreux nouveaux drones 😉 L’imprimante 3D continue donc à bien tourner 🙂
Après une année 2019 sous le signe de la diversité à tester différentes configs : true X, wide X, 2207, 2306, bas kv, hauts kv, je sais à peu près ce que je veux et cette année sera à l’unicité ! Voler avec 4 setups 5″ complètement différents c’est pas hyper confortable pour la progression ! En prime, c’est l’occasion de migrer vers la HD et le 6S !
Et oui, ça y est, je passe à la HD, ca sera le sujet d’un prochain article.
Un truc qui me faisait hésiter à passer sur le DJI FPV System, c’est l’absence de Live Audio, malgré les demandes des utilisateurs. Pour le moment, DJI semble privilégier la qualité du flux vidéo, pourtant de l’audio en très faible qualité ne consommerait pratiquement rien en bande passante et serait largement suffisant.
Avant d’entrer en détails sur le choix de la solution pour contourner ce problème et son implémentation, voici une courte vidéo :
En attendant de recevoir tout le matos pour le build, je me suis attaqué à ce problème. J’ai imaginé plusieurs d’approches différentes (VTX analogique, mini talkie-walkie désassemblé et autres détournements…), finalement, j’ai écarté toutes les options qui impliquaient un signal RF, ne voulant pas perturber le signal de la radio ou du DJI FPV System, et tendre un fil entre le quad et mon oreille n’était pas une option non plus xD
Pour clôturer 2019, plutôt que de faire un énième edit « best of the year » (beaucoup l’ont déjà fait mieux que moi 😉 ), on va plutôt discuter « progression » 🙂
Quand on commence le FPV, après avoir vu des tonnes de super vidéos sur Youtube, on se demande combien de temps ça prendra pour arriver à faire des trucs sympa ! Ca sera le sujet de cet article, avec bien sûr quelques pistes/astuces pour progresser plus vite.
Comme d’habitude, il s’agit d’un retour d’expérience personnel, je suis encore loin d’être un pilote de folie et chacun aura ses « trucs » (n’hésitez pas à les partager en commentaires 🙂 ).
Avant d’entrer dans le vif du sujet et donner un exemple concret, j’ai commencé il y a un an et demi (août 2018), voilà où j’en suis aujourd’hui:
Même si je kiffe sur le moment, à posteriori je suis rarement satisfait de mes vols et je vois toujours pas mal de choses à corriger (et tant mieux, sinon ça serait chiant ;), mais je suis quand même assez content des progrès réalisés depuis mes débuts.
La courbe de progression est différente d’une personne à l’autre, il n’y a pas de secret, il faudra beaucoup pratiquer pour s’améliorer : personne ne volera comme Johnny FPV, Steele ou J-True après 6 mois 😉 Continue reading « La progression en drone FPV (freestyle) »→
C’est une vidéo que j’ai partagée sur le forum We Are FPV, je la publie ici également. On trouve de nombreux tutos sur Youtube pour apprendre de nouvelles figures, mais il m’arrive aussi très souvent d’oublier des tricks travaillés quelques mois auparavant.
J’ai donc réalisé un petit mémo sous forme de vidéo d’une trentaine de tricks (de base, avancés, combos, rewinds et un peu de mix). Ils ne sont pas tous parfaitement maitrisés, ce n’est pas un tuto, juste un « pense-bête » 😉 Mais j’ai tout de même affiché les mouvements des sticks et il est possible de ralentir la vidéo (qui est en 60 fps) via les options Youtube. Des timescodes sont disponibles dans la description de la vidéo pour naviguer facilement entre les différents tricks.
 Dans cet article, seule et unique utilisation de ma CNC pour graver un PCB jusqu’ici, j’avais obtenu un résultat correct et fonctionnel, mais loin d’être parfait. Continue reading « CNC et PCB, volume 2 ! »
Dans cet article, seule et unique utilisation de ma CNC pour graver un PCB jusqu’ici, j’avais obtenu un résultat correct et fonctionnel, mais loin d’être parfait. Continue reading « CNC et PCB, volume 2 ! »